
2016-11-04
1.项目简介:
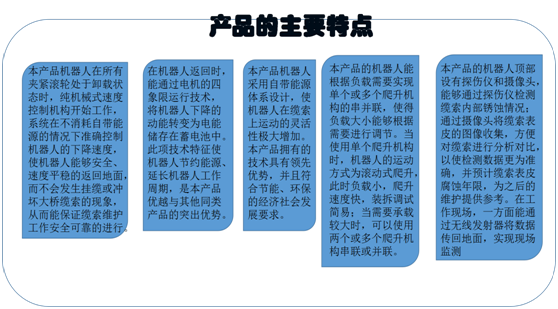
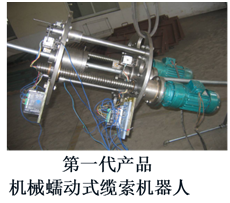
缆索被广泛的应用于桥梁、电力、建筑和矿山行业中,但易出现保护层开裂、钢丝锈蚀、断丝等问题,存在极大的安全隐患。现常采用人工或卷扬机检测等方法,但存在成本高、安全系数低等问题,本项目针对这些问题设计出了缆索维护机器人。其包括机器人本体和检测维护部件。检测维护部件利用机器人本体的爬升,来实现对缆索的检测及维护工作。其具有体积小、重量轻、负载大和意外断电能安全回程的优点。
2.成果展示:
目前该机器人已更新第四代产品,拥有极大的市场价值,与同类商品相比拥有突出优势。机器人爬升运动由夹紧滚轮组成的机械式爬升机构实现,安全返回是时由纯机械式速度控制机构和夹紧滚轮配合实现,并运用四象限运行技术将动能变为电能并储存在电池中。

3.团队介绍:
姓 名 学历 职 称 专业特长
陈 霞 硕士 副教授 机电一体化
冷护基 博士 教 授 机电一体化
王治国 硕士 讲 师 机电一体化
徐 斌 硕士 讲 师 机电一体化
赵新宇 本科 工程师 自动化


